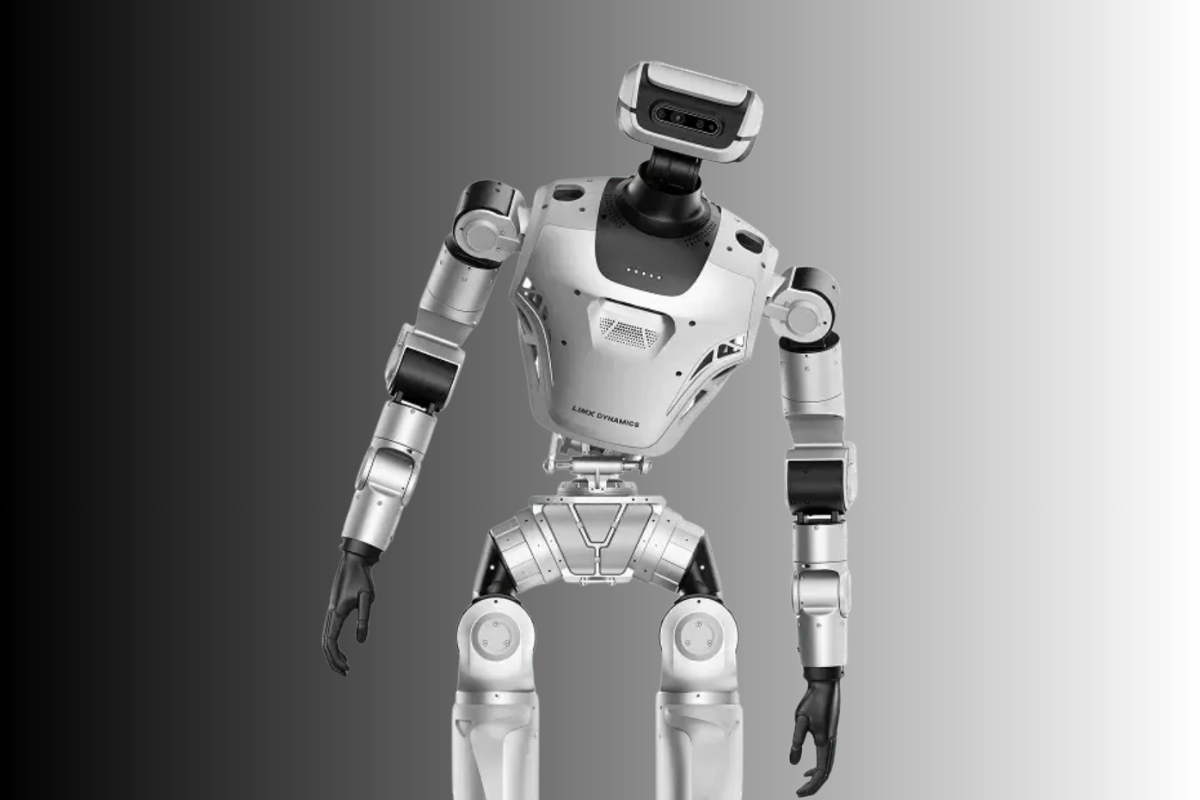
It’s amazing what a group of robotics rockstars can do when they join forces — especially when they decide to build a humanoid platform that helps anyone evolve into a robotics wizard. That’s exactly what LimX has done with OLI.
The recently launched OLI is one of the most exciting full-sized humanoids on the market: agile, flexible, easy to program and interact with, RL- and simulation-friendly, and built for serious whole-body AI and locomotion experiments. All the things that make it a standout R&D platform also give it enormous potential in the real world.
Who Are LimX Dynamics (逐际动力)?
LimX Dynamics was founded in 2022 in Shenzhen by the veteran robotic researcher Professor Wei Zhang and a team of robotics heavy-hitters with deep expertise in bipedal locomotion, stability control, multimodal robot control, reinforcement learning, and embodied manipulation. Their reputation has grown quickly — thanks to consistent overperformance of TRON1 and OLI in real-world demos, particularly across dynamic motion and control.
Considered to be among the rising stars of China’s humanoid robotics scene, the company raised its Series A+ round in March 2025 with backing from Alibaba, China Merchants VC, SAIC Capital, NIO Capital, Lenovo Capital, and VitalBridge.
LimX first launched TRON 1, the world’s first 3-in-1 bipedal robot, in late 2024 — quickly becoming one of the most respected legged robots of 2025. Their first full-size humanoid, LimX OLI, debuted at the World Robotics Conference 2025 in Beijing and is now available on the market globally.
What Makes OLI a Remarkable Humanoid?
Designed for Flexibility, Agility, and Whole-Body Control
OLI doesn’t wobble, jitter, or move like a ragdoll. Its high-torque, low-backlash actuators give it one of the best power-to-weight ratios in its class. Combined with excellent stiffness control, OLI’s movements look smooth, natural, stable, and surprisingly expressive.
Its DoF configuration (31 DoF) is impressive — dense leg DoF for locomotion, ample upper-body DoF for manipulation and balance, and high-speed hip and ankle joints — and gives OLI the athleticism of a full-sized parkour robot. The ruggedised frame and shock-absorbing limbs add resilience during repeated dynamic testing.
For research and innovation teams studying locomotion, balance, loco-manipulation, or physical interaction, this mechanical foundation is gold. You can push OLI through high jumps, rapid turns, running starts, climbs, impact absorption, and controlled recoveries without constantly worrying about hardware failures.
Equipped With Advanced Sensing and Developer-Friendly Control Access
OLI is equipped with 4 high-resolution cameras, lidar, IMU, joint encoders and distributed force-torque sensors, all feeding millisecond-level control loops. This gives it accurate proprioception - joint position, speed, torque, and external forces - essential for dynamic tasks and contact-rich behaviours.
With real-time awareness, OLI can perform complex physics calculations on the fly and adjust its posture instantly. This enables stable landings, dynamic rebalancing on uneven terrain, and reliable behaviour during high-energy motions.
Even more importantly, LimX provides full access to OLI’s software stack.
EDU and Super edition provide fully open systems for secondary development and researchers can read or override almost everything: joint states, controllers, perception, and end-effectors. Clean APIs and transparent data access give labs true R&D freedom — something many humanoids simply do not offer.
Simulation and Reinforcement Learning That Closes the Sim2Real Gap
LimX’s secret weapon is its software tools (SDK, extensive motion library and algorithm) and simulation-first approach. The team uses high-fidelity digital twins of OLI and runs millions of virtual trials across realistic environments to optimise reinforcement learning policies before deploying them on real hardware.
This:
- reduces physical wear
- accelerates behavioural development
- improves sim2real transfer
- keeps motion within safe force limits
- dramatically shortens research cycles
- reduces costs and risks to deployment.
Researchers can prototype whole-body behaviours in any mainstream simulation platforms such as Isaac Sim, MuJoCo or Gazelo, and deploy them to the robot hardware with minimal rewriting, closing the Sim2Real gap - a huge advantage for modern embodied-AI research.
And Then Some: Beyond the Lab
OLI comes in Lite, EDU, and Super edition. The EDU and Super editions offer multiple end-effector options for different use cases.
- You also don’t need a PhD to run OLI. Built-in AI capabilities lower the barrier to entry and help companies quickly develop the expertise needed to train humanoids for their own workflows.
- OLI’s hands are engineered for stable grips and can handle a variety of tools and tasks, opening pathways to logistics and light manufacturing applications.
- OLI comes with modular actuators, standardised joint components, efficient wiring layouts, and integrated electronics that simplify production and maintenance.
LimX is clearly thinking big, and more importantly, delivering the design, engineering, and performance needed to scale manufacturing and real world deployment. If this piques your interest, feel free to contact us. We’d be delighted to discuss your use case or provide a precise quote and delivery estimate.
LimX OLI Humanoid: Key Technical Specifications
Below is a consolidated overview of LimX Oli’s main specs. For more information on how to compare technical specs, see our blog post here.
Form Factor
A general-purpose full-size legged humanoid robot designed for R&D environments and real-world applications. Oli’s EDU and Super versions also come with multiple end-effector attachments and can adapt to some industrial use cases.
Dimensions
- Height: 165cm (Lite & EDU) / 175cm (Super)
- Weight: 55kg (Lite & EDU) / 60kg (Super)
- Width (Shoulder): 55cm (Lite & EDU) / 60cm (Super)
Speed
5km/h walking speed — fast enough to be useful and keep up with humans in most cases, but slow enough to be stable and safe.
Strength
- Single arm payload: 3kg (Lite & EDU) / 5kg (Super)
- Peak torque: 150 N·m
Flexibility
- 31 DoF excluding end effectors
- 7 DoF single arm
- 6 DoF single leg
- 2 DoF neck
- 3 DoF waist
- Compatible with 2-finger gripper, 3-finger gripper, dexterous hands, etc.
Flexible, precise, and capable of complex manipulation tasks.
Reliability
LimX products are remarkably reliable and robust, able to perform consistently and withstand a lot of accidental (or not) interference.
Battery & Endurance
- 9,500mAh Lithium-ion polymer swappable battery
- ~2h (Lite & EDU) / ~1.5h (Super) battery life
- ~2 hours charge time
Sensor
- 6-axis IMU (Lite & EDU) / 9-axis IMU (Super)
- 2 RGB-D camera (EDU) / 4 RGB-D camera (Super)
- LiDAR (Super)
Computing Power
- Motion control RK3588 with 8G RAM and 64G storage (Lite & EDU) / Motion control RK3588 with 16G RAM and 256G storage (Super)
- Nvidia Orin NX with 100 TOPS, 16G RAM and 1T storage (EDU) / Nvidia Orin NX with 100 TOPS, 16G RAM and 2T storage (Super)
Communication
- Wifi 6, Bluetooth 5.4, USB 3.0 / 3.2, 1,000Mbps RJ45 Ethernet,
- USD Type-C (Super), 5G (Super)
Price Range
$60,000–$80,000 EDU Version (Shipping, taxes, and import duties vary by region). Please, contact us if you are interested in discussing Lite and Super pricing.
How Does LimX OLI Compare to Unitree H1, Booster T1 and Other Humanoids?
OLI’s combination of performance, openness and flexibility is still rare in the humanoid space. If you’re looking for a balanced platform — full-sized, whole-body capable, modular, and suitable for both advanced R&D and early-stage industrial or service exploration — OLI has only a handful of worthy peers. Notably, all of them today come from China, which is currently leading the humanoid R&D hardware wave.
Unitree H1 (China)
H1 is bigger (~1.8 m), faster and more powerful, with a longer R&D track record — including appearances in a range of reinforcement-learning and locomotion academic papers. OLI is simply a smaller, more flexible (31 DoF for Oli vs. 27 DoF for H1) and more manageable alternative for everyday lab work and early industrial trials, offering similar research potential with less operational overhead.
Unitree G1 (China)
G1 is slightly smaller (~1.3 m) but shares much of the same design philosophy and supports similar R&D use cases: whole-body control, sim-to-real, manipulation and human-environment interaction. G1 also enjoys enormous visibility and a very active community. OLI, while more niche, is more flexible (31 DoF for Oli vs. 23 DoF for G1) and is arguably tighter in its sensing, control refinement and industrial-ish robustness.
AgiBot G1 (China)
AgiBot’s G1 is also a full-sized humanoid with similar goals and capabilities, but wheel-based as opposed to legged. Beyond being wheeled, G1 leans more heavily into dataset generation and foundation-model training at fleet scale, whereas OLI offers a more DoF (31 DoF vs. 20 DoF) and balanced blend of dynamic locomotion, manipulation and robust mechanical design, making it a stronger all-rounder for general humanoid R&D. For industrial use cases, it is worth noting that G1 has longer battery life (4h+ for G1 vs. ~2h for Oli).
Booster T1 (China)
T1 is a smaller (1.2 m) entry–mid tier R&D platform that competes for similar research budgets. It is simpler and therefore excellent for teaching, early research, and light motion studies. OLI, however, is a more flexible machine (31 DoF vs. 23 DoF) and a more serious, higher-capability platform for advanced loco-manipulation, whole-body AI research, and early industrial experimenters.
UBTECH Walker — Research / Platform Variants (China)
Walker is fundamentally a service robot first. It is heavier, more rigid and slower than OLI, and the research variants offer more limited access to the low-level stack. Walker is attractive to labs focused on HRI, navigation and commercial service scenarios. OLI is faster, more agile, and clearly positioned as an open-ish, engineering-driven R&D and early industrial-testing platform.
Technical FAQs
What Is a High-Torque Rotary Actuator?
A compact motor-gearbox unit delivering high rotational force at low speed, helping the robot stay stable when lifting or manipulating objects.
What Is Low Backlash In a Humanoid?
Low backlash means the robot’s joints and gear mechanisms have almost no “play” or looseness, so when the motor changes direction, the joint responds immediately without delay or wobble. This produces smoother, more precise movement.
What Is High Stiffness In a Humanoid?
High stiffness means the robot’s joints resist deformation under load or external push/force. A stiff joint holds its position precisely, without bending, sagging, or absorbing impact.
What Is a Reinforcement-Learning Control Layer Trained via Digital Twin?
The robot learns movement, balance, and manipulation inside a virtual replica of itself and its environment — performing millions of high-speed simulations and refining its behaviour far beyond what hand-coding could achieve.
What Is a Ruggedised Frame?
A structurally reinforced body designed to resist torsion, vibration, impacts, and dust/water ingress — essential for factory reliability.
What Is a Degree of Freedom?
One axis on which a joint can move or rotate. More DoF = greater dexterity and human-like motion.
What Is an End Effector?
The functional “tool” at the end of the arm — such as a robotic hand, gripper, suction tool, welding torch, drill, or specialised industrial clamp.